工业机器人已成为现代制造业的基石,处理从装配、焊接到包装和检测等各种任务。这些机器人的精度和可靠性至关重要,因为即使是微小的运动偏差也可能导致产品缺陷、效率降低或运营成本增加。虽然电机、传感器和软件通常最受关注,但有一个组件在保持精度方面起着至关重要却经常被忽视的作用: 机器人手臂轴承.
轴承是使机器人关节能够平稳旋转或直线运动的机械元件。它们可以减少摩擦、支撑变化的负载、最大限度地减少间隙并抑制振动,所有这些都直接影响机器人运动的重复性和准确性。轴承类型、材料、设计和维护方法的选择会对机器人性能产生重大影响。选择合适的轴承可以确保机械臂在重载、高速和复杂运动模式下平稳运行,而不会影响精度。
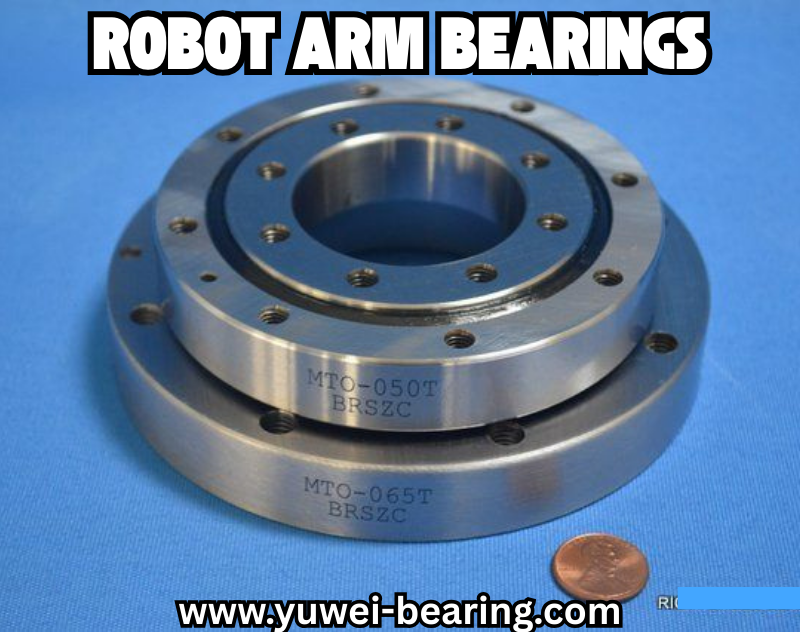
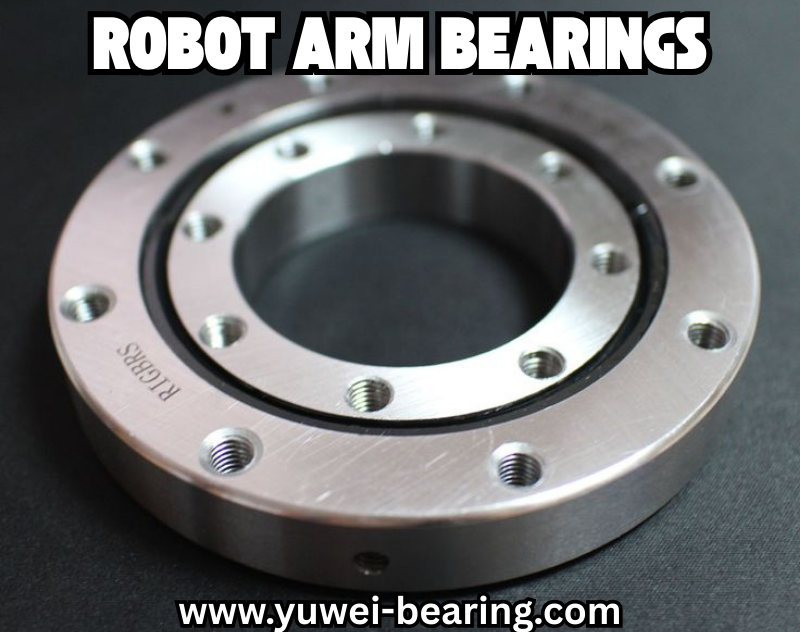
机械臂轴承提高工业机器人的精度
在本指南中,我们将解释机械臂轴承的工作原理、类型、材料、设计考虑、维护实践以及帮助工业机器人保持最佳精度的新兴趋势。
工业机器人高度依赖精度来维持生产过程中的生产力、准确性和质量。虽然软件和电机备受关注,但机器人手臂轴承也是确保平稳精确运动的关键机械部件。本指南将以实用直观的方式介绍轴承的作用、类型、材料、设计、维护、新兴趋势以及选择技巧。访问 这里!
了解机器人手臂轴承
机械臂轴承是机械部件,可使机器人关节实现平稳旋转或线性运动。它们可以减少摩擦、支撑负载并保持运动部件的对准。机械臂具有多个关节,例如底座、肩部、肘部和腕部,每个关节都需要可靠的轴承才能高效运转。
要点:
- 轴承 减少摩擦,从而实现一致的运动。
- 他们 支持径向、轴向或组合载荷 取决于接头设计。
- 正确选择轴承 尽量减少反弹、振动和位置错误。
轴承在工业机器人中的作用是将电机扭矩转换为精确的关节运动。轴承错位或磨损会降低重复性、引起振动或增加其他部件的磨损。
表1:轴承功能概述
| 功能 | 描述 |
|---|---|
| 减少摩擦 | 平滑关节运动,减少阻力 |
| 负载支持 | 处理径向、轴向或组合载荷 |
| 校准维护 | 保持机器人手臂轴承部件处于正确的方向 |
| 减少间隙 | 尽量减少改变方向时的小动作 |
| 减震 | 减少高速运动偏差 |
轴承如何影响机器人精度
这 机械臂的精度 取决于 重复性 和 准确性轴承通过控制摩擦、间隙、载荷分布和振动来影响两者。
受轴承影响的因素:
- 摩擦控制:轴承减少表面摩擦,确保运动平稳且可预测。
- 负载分配:轴承将负载分散到接头上,防止变形。
- 减少间隙:紧密公差轴承最大限度地减少了自由间隙,提高了定位精度。
- 减震:轴承吸收微振动,使末端执行器保持精确对准。
对精度的影响列表:
- 平稳的关节旋转可防止高速运行过程中出现错误。
- 均匀的负载支撑可防止弯曲或错位。
- 紧密公差轴承可减少间隙并保持一致的位置。
- 振动控制确保即使在动态负载下也能稳定运动。
轴承直接影响机器人的性能:即使轴承质量的微小改进也可以将位置误差减少几分之一毫米,这对于装配、加工和检查任务至关重要。
常见的机械臂轴承类型
机器人手臂轴承根据不同的情况使用不同的轴承 负载、速度和关节类型。最常见的类型包括:
- 滚珠轴承
- 承受中等负载并允许高速旋转。
- 运动平稳,摩擦力小。
- 常见于腕关节、肘关节。
- 角接触轴承
- 支持径向和轴向载荷。
- 严格的公差可减少间隙并提高可重复性。
- 非常适合需要刚度和精度的关节。
- 滚子轴承
- 设计用于比滚珠轴承更高的负载。
- 处理基底关节或肩关节的重力。
- 减少负载下的偏转,保持精度。
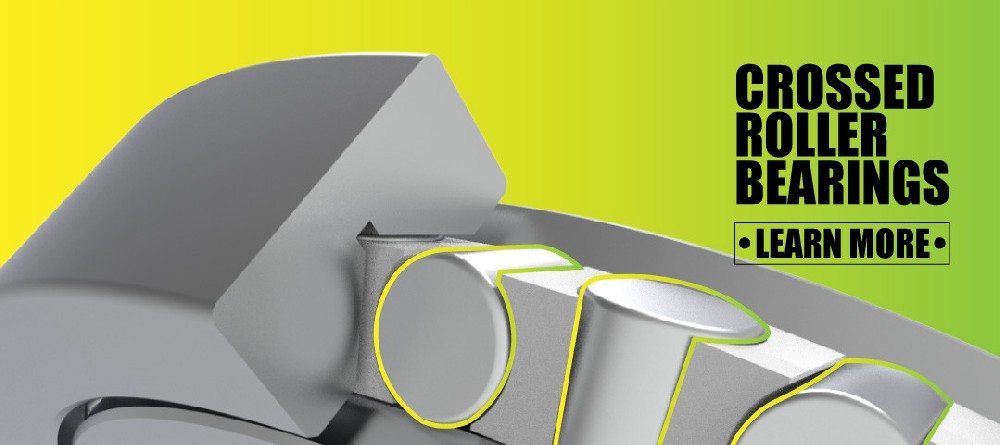
- 交叉滚子轴承
- 可多方向承载负载。
- 提供高刚度和最小的反冲。
- 用于机器人手腕等精密关键关节。
表2:轴承类型比较
| 轴承类型 | 负载能力 | 摩擦 | 典型用途 | 精密级 |
|---|---|---|---|---|
| 滚珠轴承 | 缓和 | 低的 | 腕部、肘部 | 中等的 |
| 角接触 | 高的 | 低的 | 精密接头 | 高的 |
| 滚子轴承 | 非常高 | 中等的 | 底座、肩部 | 中高 |
| 交叉滚子 | 高的 | 非常低 | 精密接头 | 非常高 |
轴承材料及其对精度的影响
材料会影响摩擦力、耐磨性和热膨胀,所有这些都会影响精度。常见的材料包括:
- 铬钢
- 高硬度和耐用性
- 适用于大多数工业机器人
- 平衡成本和性能
- 不锈钢
- 耐腐蚀
- 用于洁净室或食品级机器人
- 稍重且更贵
- 陶瓷轴承
- 重量轻、耐热、低摩擦
- 非常适合高速或高精度接头
- 成本高,但可提高可重复性并减少维护
材料选择指南:
- 铬钢:标准工业应用,中等精度。
- 不锈钢:易腐蚀环境,中等精度。
- 陶瓷制品:高速或微定位任务,精度高。
实现最佳精度的关键设计考虑因素

设计机器人手臂轴承需要仔细注意 负载、公差、润滑和速度.
轴承设计指南:
- 负载能力:必须支持静态和动态力。
- 公差与配合:更严格的公差可减少反冲。
- 润滑方式:适当的润滑可减少摩擦和磨损。
- 速度等级:轴承必须能够承受运转速度,且不会过热。
- 联合配置:轴承应与载荷的方向和类型相匹配。
实际考虑事项列表:
- 评估预期的关节负荷和运动。
- 选择在满载下保持对准的轴承。
- 确保润滑与工作温度兼容。
- 设计时应尽量减少关键接头处的间隙。
- 确认轴承材料适合环境条件。
确保轴承精度的维护实践
即使是最高质量的轴承,如果没有适当的维护也会失去效率。
关键维护实践:
- 定期检查:检查是否有磨损、错位或振动。
- 润滑计划:遵循制造商有关油脂或油的指导。
- 温度监控:轴承受热膨胀;监测以保持公差。
- 更换间隔:在轴承达到其额定使用寿命之前进行更换。
表 3:维护清单
| 维护步骤 | 频率 | 目的 |
|---|---|---|
| 目视检查 | 每月 | 检测磨损或错位 |
| 润滑 | 每周/每月 | 减少摩擦和磨损 |
| 体温检查 | 每周 | 防止过热 |
| 振动监测 | 连续的 | 检测异常运动 |
| 替代品 | 根据评级 | 保持准确性 |
精度改进指标
通过正确的选择和维护,轴承可以提高重复性和准确性。关键指标包括:
- 重复性:能够始终如一地回到同一位置。
- 准确性:精确到达目标位置的能力。
- 减少间隙:减少机械间隙可提高重复性和准确性。
- 负载处理:承受高负荷的轴承可防止偏转,保持精确定位。
指标表示例
| 公制 | 精密机器人的理想价值 |
|---|---|
| 重复性 | ±0.02毫米 |
| 准确性 | ±0.05毫米 |
| 反弹 | <0.01毫米 |
| 负载挠度 | 额定负载下<0.1毫米 |
机器人手臂轴承的新兴趋势
机器人手臂轴承正随着技术的发展而不断发展。主要趋势包括:
- 混合轴承:带有钢制滚道的陶瓷滚动元件,摩擦力低。
- 集成传感器:监测负载、振动和温度以进行预测性维护。
- 先进涂料:减少摩擦、抗腐蚀、延长寿命。
- 3D打印组件:针对空间或特定负载应用的定制轴承。
这些趋势使机械臂能够实现更高的精度、可靠性和寿命,同时降低运营成本。
选择最高精度轴承的技巧
为了确保工业机器人的最高精度:
- 匹配轴承类型 关节负荷和运动.
- 优先考虑 紧公差轴承 对于关键关节。
- 考虑 润滑和环境因素.
- 确保 易于维护 以减少停机时间。
- 平衡 成本和性能—高品质轴承减少操作错误。
表 4:轴承选择清单
| 因素 | 考虑 |
|---|---|
| 加载 | 静态力和动态力 |
| 精度要求 | 公差、间隙、重复性 |
| 环境 | 温度、湿度、污染 |
| 速度要求 | 关节最大转速 |
| 维护可及性 | 易于检查和更换 |
| 材料 | 钢、不锈钢、陶瓷 |
关于机械臂轴承的常见问题解答
Q1:机械臂轴承多久更换一次?
答:应根据制造商的额定值或检查发现磨损、振动或间隙增加时更换轴承。
问题2:所有关节都可以使用同一种类型的轴承吗?
答:不是。高负荷关节需要滚子轴承或交叉滚子轴承,而低负荷关节可以使用滚珠轴承。
Q3:润滑会影响精度吗?
答:是的。适当的润滑可以减少摩擦和磨损,保持平稳的运动和重复性。
问题4:陶瓷轴承比钢轴承好吗?
答:陶瓷轴承摩擦力小,高速性能好,但价格较高。它们是精密关键接头的理想选择。
问5:影响轴承精度的主要因素有哪些?
答:公差、负载处理和摩擦是影响精度的主要因素。
结论
在工业机器人领域,精度不仅仅是一个性能指标,而是一项基本要求。每一个动作、每一个关节、每一项任务都依赖于能够提供一致精度的组件,并且 机器人手臂轴承 轴承是这些部件中最关键的部分。轴承通过减少摩擦、支撑负载、最大程度地减少间隙和抑制振动,直接影响机器人操作的可重复性和可靠性。选择合适的轴承类型、材料和设计,可确保机械臂能够处理复杂的运动模式、高速和重载,而不会影响性能。
定期维护、适当润滑和监测对于保持轴承功能和延长使用寿命同样重要。混合轴承、传感器集成设计和先进涂层等新兴趋势正在进一步提高精度并减少工业环境中的停机时间。投资高质量、维护良好的轴承不仅可以提高运动精度,还可以提高生产力、减少错误并支持长期运营效率。
归根结底,机器人手臂轴承在机器人精度方面发挥的作用不容小觑。它们是机器人日复一日可靠运行的基础元件,能够满足现代制造业的严苛要求,同时确保最佳效率和产量。